Microfluidics y BioMems Laboratory
Bioengineering Department
Microfluidic technology is expanding more and more to various uses, one of its main applications is the development of biomedical and lab-on-a-chip devices (https://www.utec.edu.pe/blog-de-carreras/bioingenieria/lab-chip-laboratorios-que-quepan-en-la-palma-de-tu-mano), However, a current trend is to use this technology for the development and manufacture of microrobots, the latter have a series of futuristic biomedical applications that are very interesting and that range from individual cell manipulation, directed drug transport, microsurgery, to fertilization. assisted, but we will talk about it more extensively in a future article, today we will focus on how microfluidics helps the development of these micromechanisms.
One of the most common types of microrobots are the so-called “micro swimmers”, which try to imitate in size and locomotion a bacterium or some swimming microorganism.

Figure 1: Helical microstructures [ref: https://www.nature.com/articles/s41578-018-0016-9]
One of the most efficient designs is the helical-type micro swimmer, such as the one shown in Figure 1; however, manufacturing this geometry on a microscale is challenging and requires complex techniques and/or high-cost specialized machinery, such as TPP (two photon polymerization) technology, with which complex structures of a few microns in dimension can be obtained.

Figure 2: Structures fabricated with the Two Photon Polymerization process [ref:https://onlinelibrary.wiley.com/doi/full/10.1002/aisy.202100051 ]
Scientists from the Chinese University of Hong Kong and Huazhong University of Science and Technology have developed a very interesting method that simplifies the manufacture of these microrobots and also allows their continuous and mass production using microfluidics.
The technique basically consists of using the “liquid string coil effect” (https://www.youtube.com/watch?v=zz5lGkDdk78) but on a microscale, there is also the principle of a device called a “drop generator” that makes use of immiscible fluids to form micro-drops, taking advantage of the hydrodynamic interaction between them. Figure 3 shows the manufacturing principle and some experimental results.

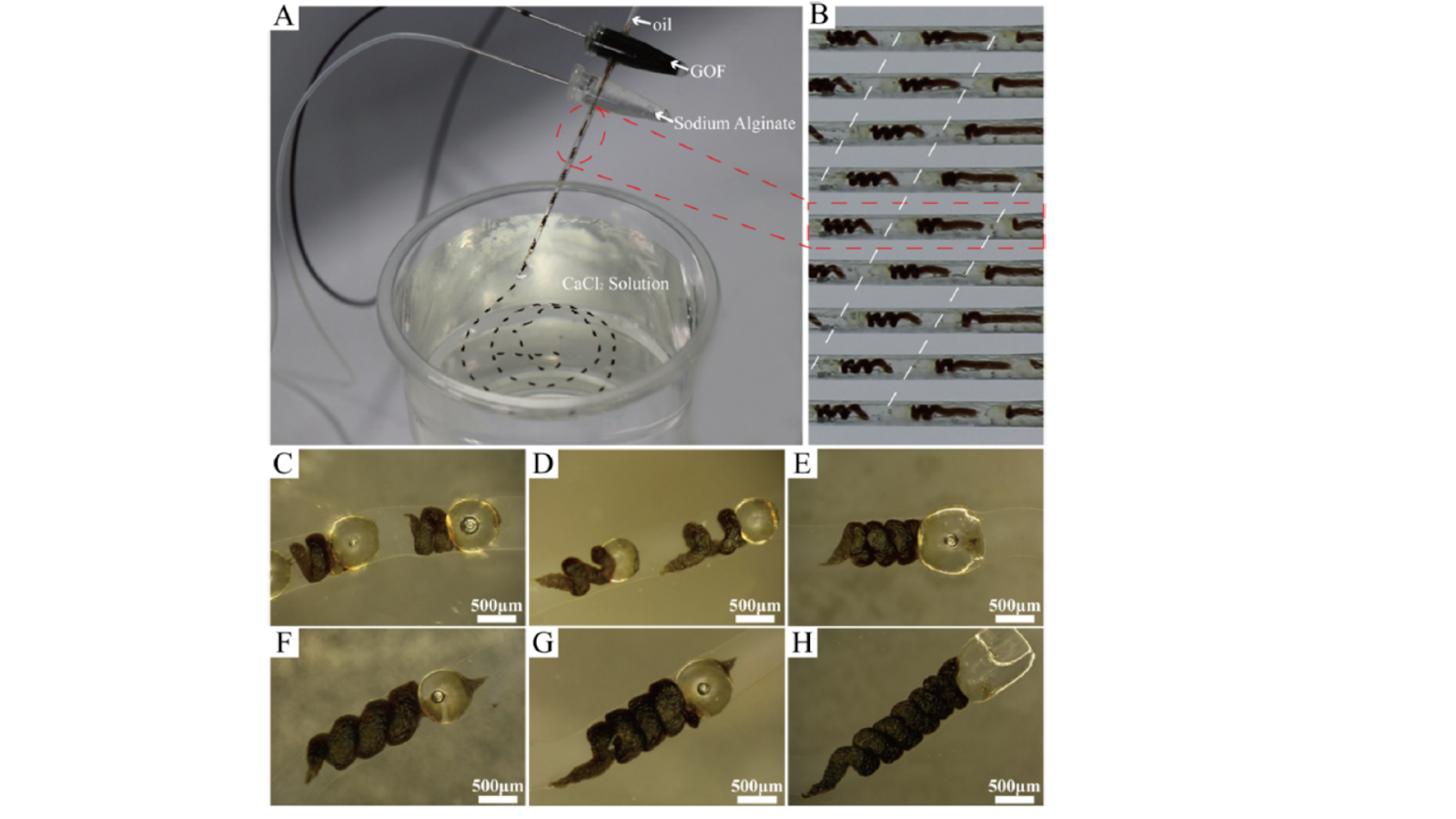
Figure 3: Operating principle and experimental results.[ref: https://pubs.acs.org/doi/10.1021/acsnano.0c07067]
In this case, the formation of an oil droplet was used to isolate the individual helicoids formed of graphene and magnetic nanoparticles (this is important for the subsequent manipulation of the microrobot using magnetic fields), the flow velocity of the interacting fluids is regulated to manipulate the final characteristics of the micro-swimmer.
It is worth mentioning that the researchers tested the movement speed of the microrobot in a millifluidic circuit and reached linear speeds of up to 866.4 μm/s.
Here is the video that illustrates all this development:
https://www.youtube.com/watch?v=00sRZL11wzo ]
Undoubtedly a simple but great technique. What other way to make a micro swimmer can you think of?