Laboratorio de Microfluidos y BioMems
Departamento de Bioingeniería
La tecnología de microfluidos se está expandiendo cada vez más a diversos usos, una de sus principales aplicaciones es el desarrollo de dispositivos biomédicos y lab-on-a-chip (https://www.utec.edu.pe/blog-de-carreras/bioingenieria/lab-chip-laboratorios-que-quepan-en-la-palma-de-tu-mano), sin embargo una tendencia actual es la de emplear esta tecnología para el desarrollo y fabricación de microrobots, estos últimos tienen una serie de aplicaciones biomédicas futuristas que son muy interesantes y que van desde manipulación individual de células, transporte dirigido de fármacos, microcirugía, hasta fertilización asistida, pero de ello hablaremos más extensamente en un proximo artículo, hoy nos centraremos en cómo la microfluídica ayuda al desarrollo de estos micromecanismos.
Uno de los tipos más comunes de microrobots son los llamados “micro swimmers”, que tratan de imitar en tamaño y locomoción a una bacteria o algún microorganismo nadador.

Figura 1: Microestructuras helicoidales [ref: https://www.nature.com/articles/s41578-018-0016-9]
Uno de los diseños más eficientes es el micro swimmer del tipo helicoidal como el que se muestra en la figura 1; sin embargo, fabricar esta geometría en microescala es retador y requiere de técnicas complejas y/o maquinaria especializada de costo elevado como por ejemplo la tecnología TPP (two photon polymerization) con la cual se puede obtener estructuras complejas de pocas micras de dimensión.

Figura 2: Estructuras fabricadas con el proceso de Two Photon Polymerization [ref:https://onlinelibrary.wiley.com/doi/full/10.1002/aisy.202100051 ]
Científicos de las instituciones Chinese University of Hong Kong y Huazhong University of Science and Technology han desarrollado un método muy interesante que simplifica la fabricación de estos microrobots y que además permite su fabricación continua y en masa haciendo uso de microfluidos.
La técnica consiste básicamente en usar el “efecto de bobina de cuerda líquida” (https://www.youtube.com/watch?v=zz5lGkDdk78) pero en microescala, también está presente el principio de un dispositivo llamado “generador de gotas” que hace uso de fluidos inmiscibles para formar microgotas aprovechando la interacción hidrodinámica entre ellos. En la figura 3 se muestra el principio de fabricación y algunos resultados experimentales.

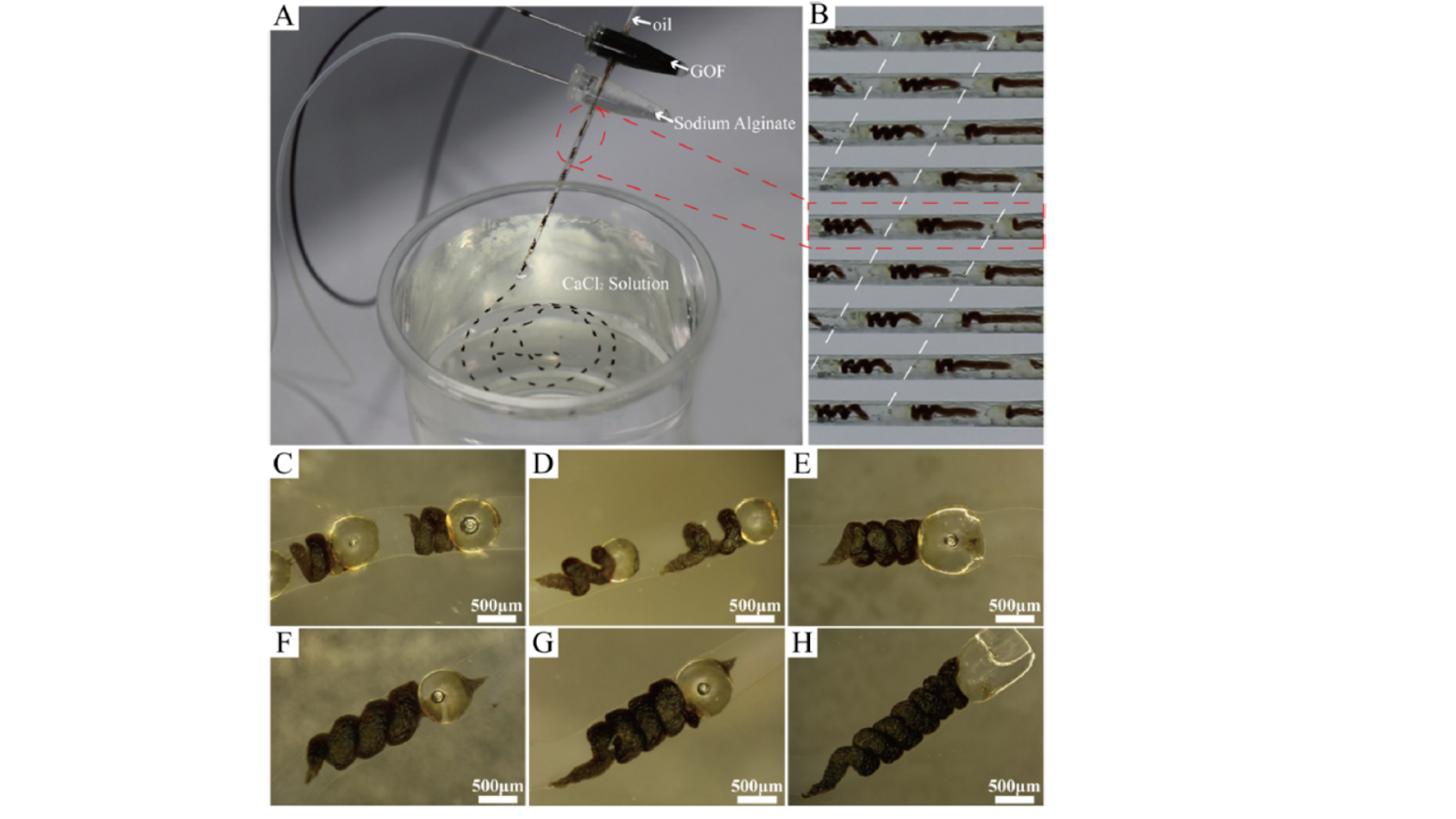
Figura 3: Principio de funcionamiento y resultados experimentales.[ref: https://pubs.acs.org/doi/10.1021/acsnano.0c07067]
En este caso se usó la formación de una gota de aceite para aislar las helicoides individuales formadas de grafeno y nanopartículas magnéticas ( esto es importante para la posterior manipulación del microrobot usando campos magnéticos), la velocidad de flujo de los fluidos en interacción se regula para manipular las características finales del micro-swimmer.
Cabe mencionar que los investigadores probaron la velocidad de desplazamiento del microrobot en un circuito milifluídico y llegaron a velocidades lineales de hasta 866.4 μm/s.
Aquí el video que ilustra todo este desarrollo:
https://www.youtube.com/watch?v=00sRZL11wzo ]
Sin duda una técnica simple pero genial ¿Qué otra forma de fabricar un micro swimmer se te ocurre?